Güç Aktarımı
Motorları genellikle direkt olarak mekanizmalara bağlamayız. Motordan gelen gücü aktarırken farklı parçalar ve mekanizmalar kullanılır. Bu esnada dişli oranına bağlı olarak tork ve hız değişebilir. Öncelikle bu kavramlardan bahsedelim.
Temel Kavramlar
Hız (RPM): RPM, "rotation per minute" yani dakika başına dönüş anlamına gelir. Alınan yolun zaman oranını gösterir.
Tork: Tork, bir cismi döndürmek için uygulanan kuvvettir. Basitçe söylemek gerekirse, motorun tekerleği veya bir kolu ne kadar güçlü şekilde döndürebileceğini gösterir.
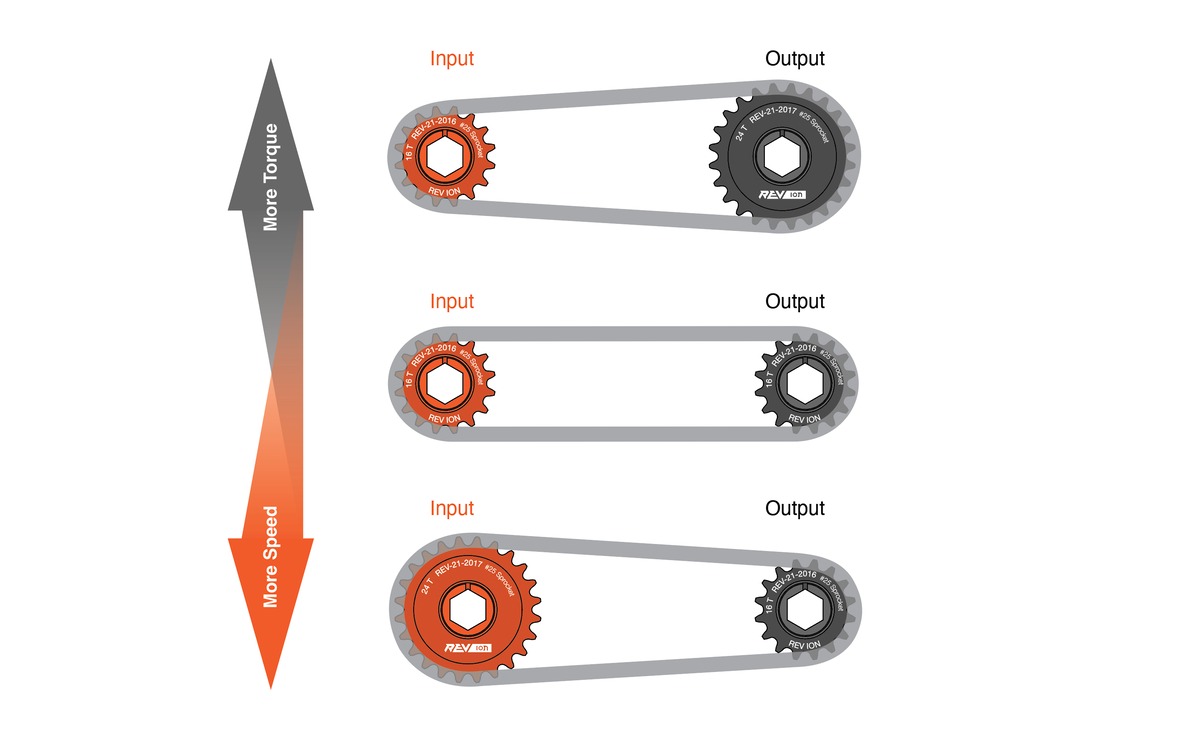
Dişli Oranı (Gear Ratio): Dişlilerin veya aksların diş sayılarının oranıdır. Büyük dişliden küçük dişliye güç aktarılırken tork azalır ve dönüş hızı artar; küçük dişliden büyük dişliye aktarılırken ise tork artar ve hız azalır. Tork ve hız ters orantılıdır; biri artarken diğeri azalır.
Formül:
Dişli oranı = Sürülen dişli / Sürücü dişli
Örnek: Motor dişlisi 12 dişe sahip, bağlı olduğu büyük dişli 36 dişe sahip.
Gear ratio = 36 ÷ 12 = 3:1
Tork 3 katına çıkarken hız 3 kat düşer.
Güç Aktarım Sistemleri
Dişli Sistemleri
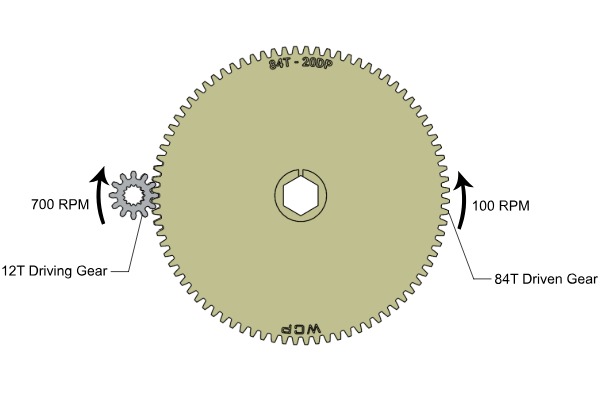
Dişli sistemleri, robotlarda motor gücünü başka bir mile iletmek ve aynı zamanda hız veya torku değiştirmek için kullanılan mekanik güç aktarım sistemleridir. Birbirine temas eden dişli çarklar sayesinde hareket aktarılır.
FRC robotlarında dişli sistemleri özellikle şanzımanlarda (gearbox) kullanılır. Motorların yüksek hızını düşürerek robot tekerleklerine daha fazla tork (çekiş gücü) sağlamak için dişli oranları ayarlanır.
Dişli sistemlerinin önemli özelliklerinden biri dönüş yönüdür. Birbirine temas eden iki dişli çark zıt yönlerde döner. Yani süren dişli saat yönünde dönüyorsa sürülen dişli saat yönünün tersine döner. Eğer sistemde üç veya daha fazla dişli kullanılırsa yön her dişlide tekrar değişir. Bu nedenle tasarım yapılırken dişli sayısı ve yerleşimi dönüş yönünü belirlemek açısından önemlidir.
Dişli sistemlerinin en önemli avantajlarından biri yüksek verimlilik ve kayma olmamasıdır. Dişliler birbirine mekanik olarak kilitlendiği için güç kaybı oldukça düşüktür. Ayrıca çok yüksek kuvvetleri güvenli şekilde aktarabilirler.
Bununla birlikte dişli sistemleri genellikle daha ağırdır ve hizalama hassasiyeti gerektirir. Yanlış hizalanmış dişliler aşınmaya veya kırılmaya neden olabilir. Bu nedenle robot tasarımında doğru montaj büyük önem taşır.
Kaynak: WCP Gears Rehberi
Kayış Sistemleri
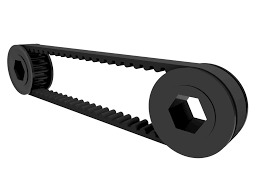
Kayış sistemleri, iki mil arasında hareketi dişli kayış ve kasnaklar (pulleys) aracılığıyla ileten bir güç aktarım yöntemidir. FRC robotlarında genellikle timing belt (dişli kayış) kullanılır.
Dişli kayışlar, kasnak üzerindeki dişlerle uyumlu olduğu için kayma olmadan hareket aktarabilir. Bu özellik onları özellikle hızlı ve sessiz çalışan mekanizmalarda tercih edilir hale getirir.
Kayış sistemlerinin en önemli avantajlarından biri hafif ve sessiz çalışmalarıdır. Ayrıca zincire göre bakım ihtiyacı daha azdır ve yağlama gerektirmez. Bu nedenle birçok FRC takımında intake, shooter veya conveyor mekanizmalarında kayış kullanılır.
Ancak kayış sistemleri çok yüksek kuvvetlerde zincire göre daha zayıf olabilir. Ayrıca doğru gerginlik ayarı (tension) yapılmazsa kayış diş atlayabilir veya sistem verimi düşebilir.
Kaynak: WCP Belts and Pulleys Rehberi
Zincir Sistemleri
Zincir sistemleri, gücü iki mil arasında zincir ve dişli çarklar (sprocket) kullanarak ileten dayanıklı bir güç aktarım sistemidir. FRC robotlarında özellikle drivetrain (yürüyüş sistemi) için sıkça tercih edilir.
Zincirler yüksek kuvvetlere dayanabildiği için ağır yük taşıyan veya yüksek tork gerektiren mekanizmalarda oldukça güvenilirdir. Ayrıca kayış sistemlerine göre daha dayanıklı ve uzun ömürlüdür.
Bu sistemlerin önemli avantajlarından biri yüksek güç aktarım kapasitesidir. Bu nedenle FRC robotlarında tekerlekleri birbirine bağlamak için zincir sistemi sıklıkla kullanılır.
Ancak zincir sistemleri genellikle daha gürültülü çalışır ve düzenli bakım gerektirir. Zincirin doğru gerginlikte olması ve gerektiğinde yağlanması sistemin sağlıklı çalışması için önemlidir.
Kaynak: REV Sprockets and Chain Rehberi